A principal característica destes motores é que, ainda sendo alimentados com tensão contínua, dispensam o uso de escovas.
Desta forma, elimina-se o faiscamento (característico do motor DC com escovas) juntamente com outras limitações tais como o ruído provocado pela comutação e a velocidade máxima. Já o motor DC sem escovas supera estas limitações podendo atingir velocidades maiores com menos ruído, maior eficiência e confiabilidade. Isto último, em função de não possuir escovas (ausência de comutador eletromecânico).
Atualmente, três são os tipos de motores sem escovas utilizados nos sistemas de eletrônica embarcada:
1. Motor BLDC com ímãs permanentes no rotor;
2. Motor SRM de relutância comutada (sem ímãs permanentes);
3. Motor de indução (sem ímãs permanentes).
Outras características relevantes são:
- Ao contrário do motor DC convencional, no motor BLDC e no SRM os eletroímãs se encontram no estator. A potência é fornecida de forma sequencial, aos pares de enrolamentos do estator, o que é um fator de simplificação construtiva. Também facilita o arrefecimento.
- Em função da necessidade de energizar os eletroímãs de forma não contínua, estes motores não podem ser alimentados diretamente com tensão DC. Um circuito eletrônico de controle realiza a comutação dos eletroímãs,
- Num motor DC convencional, o torque é produzido através da interação de 2 campos magnéticos (separados) por forças de atração e de repulsão. No motor DC sem escovas, pelo contrário, o torque é produzido somente por atração magnética (motor BLDC e motor de indução) ou por forças de relutância (motor SRM).
- A cada giro do motor com escovas, o rotor experimenta inversão de fluxo magnético, o que resulta em perda de energia no rotor. Pelo contrário, nos motores BLDC e SRM, em função de não haver inversão de fluxo, não há perdas. Todas as perdas se localizam no estator, o que resulta no resfriamento facilitado.
- Não há faiscamento e, portanto, desgaste de escovas.
- Com relação ao motor DC com escovas, apresenta maior densidade de potência. Ou seja, maior potência desenvolvida por unidade de volume.
Complementando o artigo da edição anterior, a seguir será analisado o motor de relutância comutada.
Motor SRM (switched reluctance motor) – Motor de Relutância Variável ou Comutada
Este motor não possui nenhum tipo de ímã permanente. O seu estator é similar ao do motor BLDC, no entanto, o rotor está constituído simplesmente de laminações de material ferromagnético com saliências, como mostrado na figura 1. O seu princípio de funcionamento é o de “relutância magnética variável”.
Relutância Magnética
A relutância de um circuito magnético é equivalente à resistência de um circuito elétrico e o fluxo magnético equivalente à corrente. Da mesma forma que um campo elétrico faz a corrente elétrica seguir o caminho de menor resistência, um campo magnético faz o fluxo magnético seguir o caminho de menor relutância.
Assim, um elemento de material ferromagnético (ferro, níquel, cobalto, etc.) presente num campo magnético tende a se alinhar com o sentido do campo, o que provoca a diminuição da relutância e com isto, o aumento do fluxo.
De uma outra forma, as forças geradas pelo campo magnético (forças de relutância) propiciam o alinhamento máximo do circuito magnético criado, de forma a apresentar o mínimo entreferro.
Como no motor BLDC (analisado em edição anterior), as bobinas do estator são energizadas em sequência com um padrão rotativo gerando o torque necessário à movimentação do rotor. A diferença é que, no caso do motor de relutância, a orientação do campo magnético gerado pelos eletroímãs é irrelevante. As bobinas dos eletroímãs opostos são conectadas em série e energizadas sempre, com a mesma polaridade.
No caso do motor de relutância variável, o rotor possui segmentos (saliências ou protuberâncias) de baixa relutância alternando com segmentos de alta relutância. Uma característica importante é que o número de polos (pares de bobinas) do estator é diferente do número de saliências do rotor. Por exemplo, 6 polos no estator e 4 protuberâncias no rotor.
A cada instante, o rotor forma, com o par de bobinas energizadas, um circuito magnético cuja relutância resulta mínima na situação em que saliências do rotor se alinham com o par de bobinas energizadas e o entreferro (folga entre eles) é o menor. Ou de outra forma, o par de bobinas energizadas atrai os segmentos de baixa relutância (saliências) mais próximos.
Como resultado disto, o torque é produzido pela tendência das saliências do rotor a se alinhar com o fluxo produzido pelos eletroímãs do estator. A energização dos eletroímãs na sequência apropriada provoca a rotação do motor.
Funcionamento
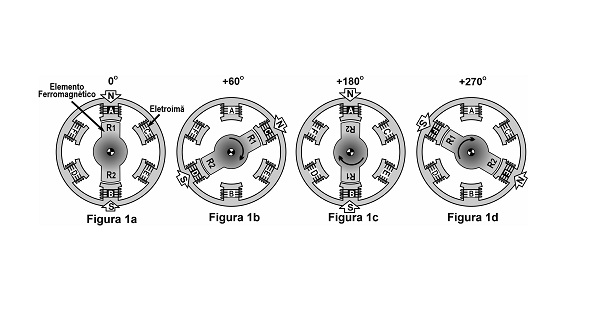
A análise será feita com o exemplo da figura 1 ainda que não seja esta a configuração utilizada nas aplicações atuais. No exemplo, a cada comutação de bobinas o rotor gira 60O no sentido horário.
- Na figura 1a o rotor encontra-se alinhado com os eletroímãs A e B energizados de forma tal que A é o polo N e B, o polo S. Isto, em função de que esta situação é a de menor relutância (mínimo entreferro) do circuito magnético formado pelos eletroímãs e o rotor.
- Na figura 1b os eletroímãs energizados são o C e o D de forma tal que C é o polo N e D, o polo S. O rotor girou 60O no sentido horário com relação à posição da figura [3a].
- Na sequência são energizados os eletroímãs E e F de forma tal que E é o polo N e F, o polo S (posição não ilustrada). O rotor gira mais 60O com relação à posição da figura 1b.
- Na figura 1c são energizados os eletroímãs A e B de forma tal que A é o polo N e B, o polo S. Reparar que, como mencionado, a polaridade dos eletroímãs é irrelevante para o funcionamento do motor. Isto, em função de que o torque é produzido por forças de relutância e não por atração de polos magnéticos como é o caso do motor BLDC. Nesta situação o rotor girou 180O com relação à posição da figura 1a.
-Na sequência são energizados os eletroímãs C e D de forma tal que C é o polo N e D, o polo S (posição não ilustrada). O rotor gira mais 60O com relação à posição da figura 1c.
- Na figura 1d os eletroímãs energizados são o E e o F de forma tal que, novamente, E é o polo N e F, o polo S. O rotor girou 270O no sentido horário com relação à posição da figura 1a.
- Na sequência são energizados os eletroímãs A e B de forma tal que, novamente, o rotor se encontra na posição da figura 1a com o polo N em A e o polo S em B. O rotor girou 360O no sentido horário.
Do apresentado acima se conclui que a velocidade de rotação do motor SRM é função da frequência de comutação (energização) dos eletroímãs.
Como mencionado, nas aplicações práticas do motor de relutância variável, o rotor possui um número maior de saliências (segmentos de baixa relutância). Por exemplo, 6 eletroímãs e 4 saliências no rotor ou 8 eletroímãs e 6 saliências no rotor.
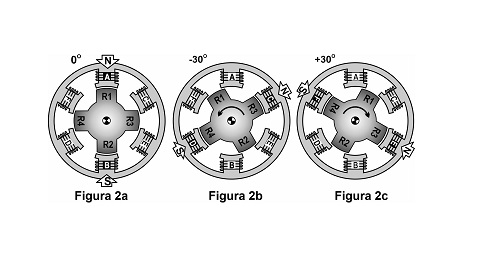
O exemplo da figura 2 será utilizado para analisar o funcionamento. Nele, por ter 4 saliências e 6 eletroímãs, a cada comutação de bobinas o rotor gira 30O no sentido horário ou anti-horário.
- Na figura 2a o rotor encontra-se alinhado com os eletroímãs A e B energizados de forma tal que A é o polo N e B, o polo S. Isto, em função de que esta situação é a de menor relutância (mínimo entreferro) do circuito magnético formado pelos eletroímãs e o rotor.
- Na figura 2b os eletroímãs energizados são o C e o D, de forma tal que C é o polo N e D, o polo S. Reparar, no entanto, que o rotor girou 30O no sentido anti-horário com relação à posição da figura 2a. Isto, em função de que, ao desativar os eletroímãs A e B e energizar C e D, as saliências R3 e R4 estavam mais bem posicionadas (mais próximas) para atingir a condição de menor relutância do circuito magnético formado pelos eletroímãs e o rotor.
- Para provocar a rotação no sentido horário, a partir da posição mostrada na figura 2a, deve ser desativado o par A-B e energizado o par E-F, o que levará as saliências R3-R4 a se alinharem, como mostra a figura 2c. Como resultado, o rotor gira 30O no sentido horário.
O importante a ser salientado é que o par de eletroímãs energizado provocará o alinhamento do par de saliências mais próximas.
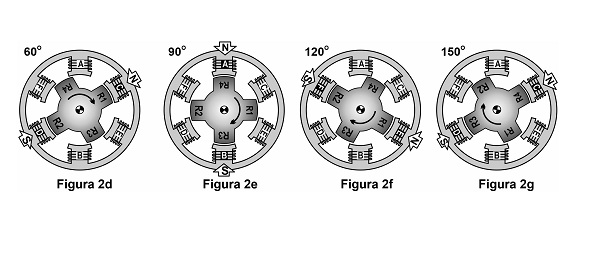
Para complementar a análise do funcionamento, a seguir é apresentada parte de sequência de comutação de eletroímãs para a continuação da rotação no sentido horário, a partir da situação da figura 2c:
- Na sequência deve ser desativado o par E-F e energizado o par C-D para obter o alinhamento das saliências R1-R2 (fig.2d).
- Na sequência deve ser desativado o par C-D e energizado o par A-B para obter o alinhamento das saliências R3-R4 (fig.2e).
- Na sequência deve ser desativado o par A-B e energizado o par E-F para obter o alinhamento das saliências R1-R2 (fig.2f).
- Na sequência deve ser desativado o par E-F e energizado o par C-D para obter o alinhamento das saliências R3-R4 (fig.2g).
- A sequência continua com a energização dos pares: A-B, E-F, C-D, A-B, E-F; C-D e A-B (fig.2a) completando desta forma uma rotação de 360O. As figuras apresentam o ângulo girado com relação à posição da figura 2a.
Nota: O motor SRM não pode funcionar como gerador.