
Esta mudança vai gerar impacto assim como provocou na indústria automotiva com a introdução de robôs na fabricação dos veículos. No transporte não será diferente, gradativamente os motoristas serão alocados em outras atividades e os caminhões autônomos passarão a ocupar espaços nas mineradoras e nas estradas.
No entanto, este não é um caminhão elétrico, na verdade, ele ainda tem um motor de combustão interna, mas para os futuros modelos, certamente serão híbridos e totalmente elétricos, que estão chegando para atender aos sistemas de transportes inteligentes, nos quais os veículos autônomos desempenharão uma função importante.

Esta inteligência artificial que está nos caminhões autônomos tem que prever todas as variáveis possíveis no seu trajeto, vale lembrar que estes caminhões são os pioneiros que utilizam o sistema autônomo e seu uso ainda é limitado, muitas melhorias tecnológicas ainda serão desenvolvidas.
Estamos acostumados a reconhecer os caminhões pela cabine, agora temos o novo módulo frontal inteligente que substitui a cabine tradicional, mas mesmo sem ela, é facilmente reconhecível como sendo um caminhão Scania, parece que até a escolha da cor contribui para lembrar a marca do fabricante.

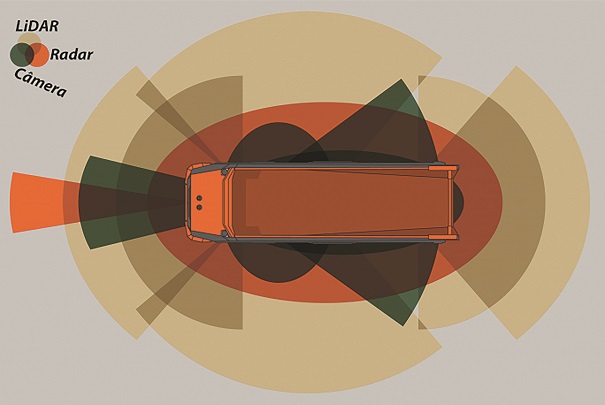
Os sensores, câmeras e radar deste caminhão autônomo substituem o olho humano, mas o maior desafio foi de desenvolver a capacidade do cérebro humano de processar decisões baseadas na visão e passar para uma máquina que vai tomar suas próprias decisões.
Os sensores de radar são confiáveis, mas a resolução das câmeras é insuficiente para identificar os pedestres e pequenos objetos à distância. A câmera oferece um nível de detalhe suficiente e uma boa visão geral em duas dimensões, mas requer um software massivo para converter imagens 2D do ambiente circundante em 3D. Geralmente, para veículos autônomos, o software é mais importante que o hardware.
Redundância é um termo comum na aviação, em que sabemos que temos mais de um componente para fazer a mesma operação, no caso de um falhar, há um segundo ou até um terceiro que vai garantir o funcionamento do sistema. (Fig.4)
Esta estratégia também está presente na condução autônoma, que utiliza sensores adicionais para garantir a condução segura do caminhão.
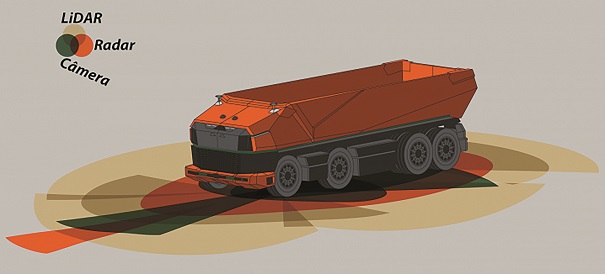
Além das câmeras, sensores, radar, LiDAR e receptores de GPS, o sistema foi projetado para um nível que atenda às necessidades operacionais das mineradoras mas o sistema ainda não é inteligente para atuar nas ruas. O olho humano não é facilmente substituído, mas é possível obter uma visão geral relativamente boa dos arredores por meio de sensores. Nesse caso, vemos o que precisamos ver pois, dirigir em uma mina é bastante simples e previsível.
A complexidade do sistema é compatível com sua aplicação, nesta fase atende perfeitamente à indústria de mineração, as fases que virão serão mais robustas e com inteligência artificial capaz de permitir que o caminhão autônomo circule pelas ruas de forma segura.
O estilo do veículo é determinado principalmente pelo ambiente e pela aplicação, se o veículo estiver sendo projetado para trabalhos de mineração e construção, ele deve transmitir robustez e potência, enquanto o desenho de um caminhão de distribuição autônomo para as cidades deve dar uma impressão mais amigável. Um caminhão de mineração convencional possui duas partes distintas, a cabine e a unidade basculante e no autônomo isso mudou, onde era a cabine fica agora o módulo frontal onde todas as informações são processadas.

Para os engenheiros que desenvolveram o caminhão autônomo, foi como entrar em um território desconhecido ou uma quebra de barreiras pois, o modelo de caminhão convencional que não mudou por quase 100 anos teve que ser alterado para abrigar as novas tecnologias.
Em pouco tempo, os engenheiros da Scania transformaram um caminhão convencional em um veículo totalmente autônomo, com a cabine tradicional substituída por um módulo frontal com tecnologia inteligente e descobriram que é muito mais difícil do que muitos imaginaram desenvolver um veículo autônomo seguro para aplicações variadas em diferentes ambientes.
O cérebro do Scania AXL é o módulo frontal inteligente, onde os dados das câmeras, sensores, LiDAR, radar e GPS juntos geram uma visão comum dos arredores imediatos do veículo.

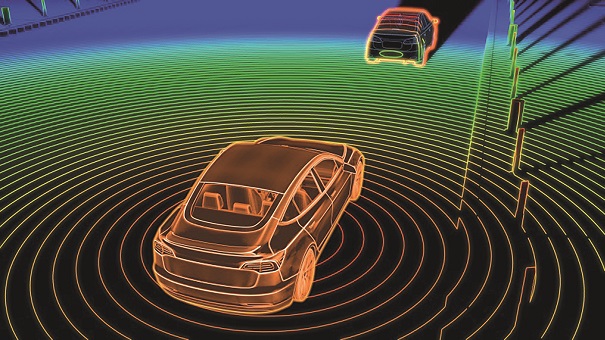
Mas antes vamos conhecer o sistema LiDAR que está ajudando os veículos autônomos a ver mais claramente.
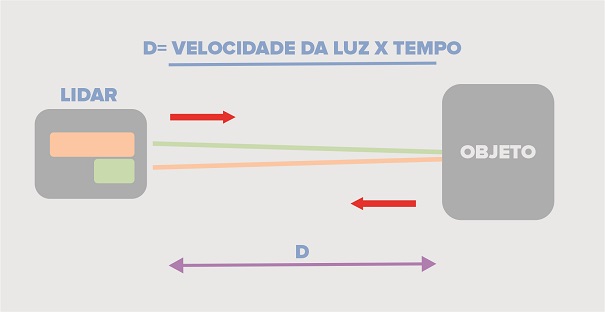
LiDAR, da sigla inglesa Light Detection And Ranging, é uma tecnologia óptica de detecção remota que mede propriedades da luz refletida de modo a obter a distância ou outra informação a respeito um determinado objeto distante. O método mais utilizado para determinar a distância a um objeto é a utilização de laser pulsado em conjunto com um scanner e um receptor GPS.
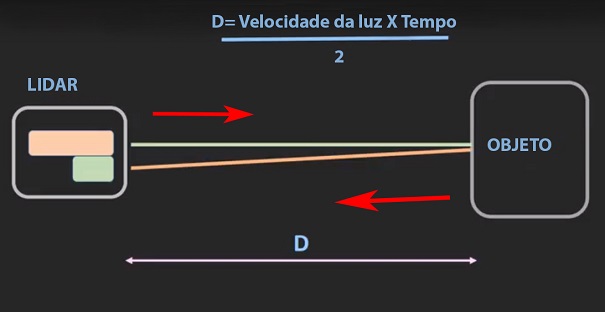
A distância de um objeto é determinada medindo a diferença de tempo entre a emissão de um pulso laser e a detecção do sinal refletido, de forma semelhante à tecnologia do radar, que utiliza ondas de rádio.
O sistema LiDAR é uma tecnologia essencial que ajudará a atingir o nível 5 em veículos autônomos sem volantes, sem pedais de freio, sem intervenção humana na direção.
Níveis de automação automotiva - SAE International J3016 Jan 2014; a linha verde pontilhada indica o estado da arte atual.

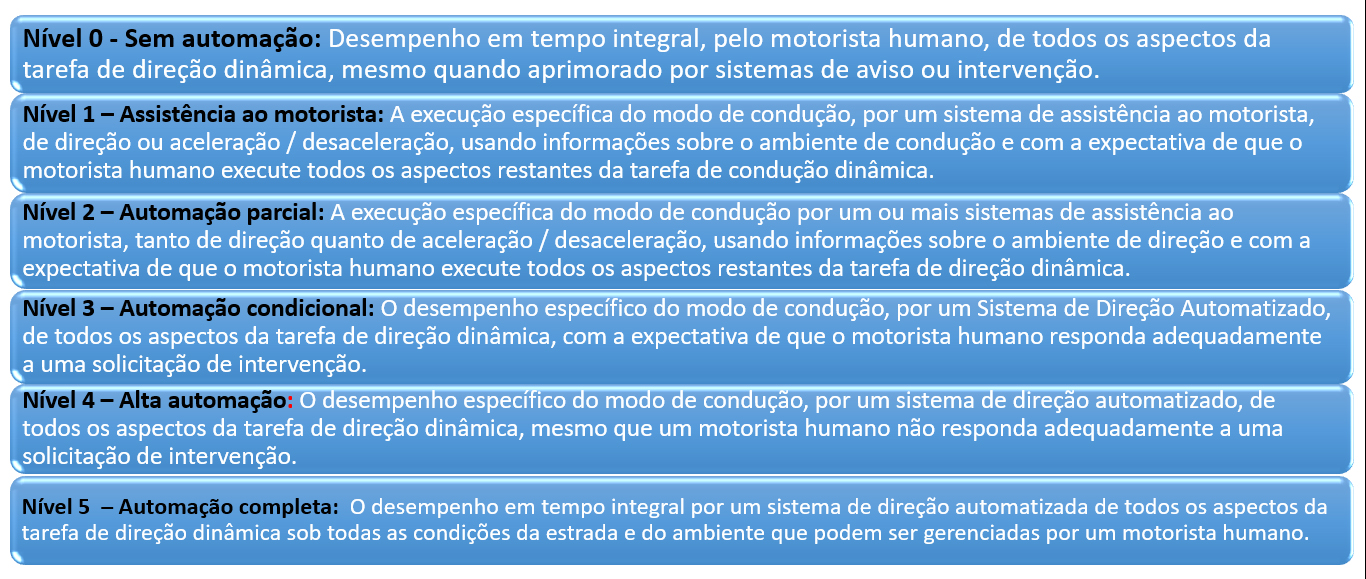
Muitos carros de gama alta (e cada vez mais intermediários e médios) já possuem alguns sistemas avançados de assistência ao motorista (ADAS) para ajudar na detecção / prevenção de colisões e avisos de saída de faixa, fornecendo autonomia de "Nível 1 ao Nível 2", com alguns protoveículos de tipo / pré-produção, como o Audi 8, capazes de operar totalmente com as mãos livres ("Nível 3").
Algumas empresas como Google / Waymo e Volvo estão pulando as etapas intermediárias e trabalhando no desenvolvimento de veículos "Nível 5" totalmente autônomos, acreditando que a atração do consumidor será obtida apenas com veículos totalmente automatizados, e não uma abordagem híbrida. É tarde demais para fechar a porta, já que o “cavalo autônomo” já está fora do celeiro.
A autonomia automotiva está fundamentada sobre os veículos responderem automaticamente; navegando, freando, acelerando, dirigindo conforme as necessidades do seu ambiente que envolvem outros veículos, condições da estrada, pedestres ou outros obstáculos ou perigos imprevisíveis.
O velho ditado “você não pode gerenciar o que não mede” se aplica à autonomia automotiva; os veículos precisam medir seu ambiente e seu local nessas cenas dinamicamente variáveis, detectando, gerando imagens e detectando com precisão suas condições e arredores, a fim de gerenciar seu caminho com segurança por toda a infraestrutura rodoviária e arredores.
Existem muitas tecnologias de sensores que podem contribuir para criar um mapa 3D dinâmico de um veículo e seus arredores, mas as três principais tecnologias que fornecem orientação para automação da direção, aceleração e frenagem (ou seja, condução na estrada) são RADAR, câmeras, e, mais recentemente, LiDAR. Existem prós e contras em cada uma dessas tecnologias de sensores de imagem para veículos autônomos.
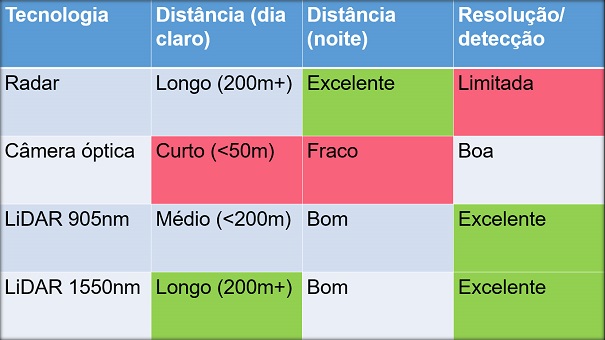
O radar (de médio e longo alcance) pode medir a distância e a velocidade relativa de objetos a distâncias de até 200 m em todas as condições de iluminação e ambiente, mas, devido aos longos comprimentos de ondas de rádio e aos amplos feixes utilizados, é incapaz de diferenciar e resolver os detalhes dos objetos que são detectados (como a direção em que a motocicleta está voltada ou se uma pessoa está caminhando em direção ou se afastando do caminho de um veículo).
As câmeras ópticas podem fornecer imagens precisas de uma cena, mas têm alcance limitado, não fornecem informações de distância e velocidade relativa e limitam-se a funcionar em condições bem iluminadas e com boa visibilidade. A visão fornecida pelas câmeras reproduz mais de perto a dos motoristas humanos, mas queremos e precisamos de soluções autônomas para serem melhor do que estamos vendo o ambiente de direção.
O LiDAR é o sistema mais novo do ramo quando se trata de sensores automotivos, mas está longe de ser uma nova tecnologia. LiDAR é um acrônimo para Light Detection and Ranging e foi estabelecido como uma tecnologia de defesa há 50 anos (para aplicações seguras de medição e direcionamento de distância).
Fundamentalmente, o LiDAR envolve o envio de luz (em oposição às ondas de rádio usadas no RADAR) de uma fonte e a medição do feixe retornado. Como os comprimentos de onda usados (normalmente 905nm ou 1550nm) são muitas ordens de magnitude menores que as ondas de rádio, uma imagem de resolução muito mais fina pode ser formada dos objetos interceptados pela luz incidente.
Além disso, diferentemente das câmeras, os sistemas LiDAR iluminam os arredores e, portanto, não dependem da iluminação ambiente funcionando igualmente bem durante o dia ou noite.
Trabalhar em comprimentos de onda maiores que o visível também oferece uma vantagem em condições de visibilidade reduzida (como neblina ou chuva), embora as ondas de rádio muito longas do RADAR tenham uma vantagem significativa nessas condições. A segurança ocular é outro fator importante ao usar a iluminação a laser.
A menor potência das fontes de 1550nm aborda essa preocupação. Por último, mas não menos importante, vem o preço; enquanto os preços estão caindo, os sistemas LiDAR ainda são mais caros do que as opções radar ou câmera.
Enquanto os sistemas LiDAR de 905nm podem usar detectores CMOS ou CCD, comuns em tecnologias de câmera, os sistemas de 1550 nm empregam detectores InGaAs que ainda são muito mais caros. Espera-se que, à medida que a demanda por esses detectores de comprimentos de onda mais longos aumente, os preços diminuam, tornando essa opção comercialmente viável.
Ao varrer continuamente o ambiente ao redor e usar essas informações de distância do tempo de voo, um mapa de pontos 3D em tempo real pode ser gerado. A resolução alcançável com o mapeamento LiDAR significa que este mapa pode não apenas mostrar a presença de um obstáculo, mas também permite o reconhecimento de imagens para determinar qual é o objeto e como ele está se movendo no ambiente. Por exemplo, se o objeto é outro carro, ele está estacionado ou em movimento e em que direção está voltado (ele entrará no caminho do motorista ou está se afastando).
Para que esses sistemas funcionem corretamente e gerem imagens precisas, é essencial que o detector seja capaz de distinguir e discriminar o feixe de retorno de outras fontes de luz, como luz ambiente, iluminação pública, faróis e até outros sistemas LiDAR. É aqui que os filtros ópticos desempenham um papel muito importante.
Se os detectores são os "olhos" de um sistema LiDAR, os filtros ópticos são os "óculos de sol" - reduzindo o brilho para permitir que os olhos vejam o que estão procurando sem o ruído de fundo. Na prática, isso significa que duas das principais funções dos filtros ópticos nesses sistemas são:
a) reduzir a luz dispersa, fantasmas e reflexões traseiras;
b) fornecer seletividade do comprimento de onda para impedir que toda a luz atinja o detector.
A redução de imagens refletidas / dispersas pode ser alcançada através de revestimentos antirreflexo (AR) eficazes de baixa perda. Esses revestimentos foram projetados para fornecer baixa refletividade (<0,5%) sobre o comprimento de onda e a faixa angular que a óptica a ser revestida (lentes, janelas, filtros) precisa operar.
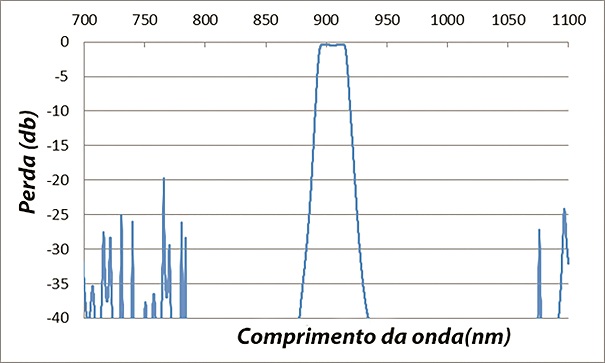
A seletividade do comprimento de onda requer um filtro óptico mais complexo com uma banda de transmissão alta o mais estreita possível (o sinal) com bloqueio amplo e profundo de todas as outras luzes estranhas (o ruído). Essa funcionalidade de filtro passa-banda é muito comum em muitas aplicações ópticas. Como mencionado acima, os sistemas LiDAR automotivos normalmente operam em 905nm ou 1550nm; em ambos os casos, o filtro passa-banda desejado terá alta transmitância (> 90%) no comprimento de onda do laser "inicial". A diferença está no intervalo em que os detectores de Si ou InGaAs operam (~ 300-1100nm e ~ 900-1700nm, respectivamente), pois define a região sobre a qual o bloqueio profundo (de preferência <0,01% da média (OD4)) do "ruído" de fundo é necessário.
Existem vários aspectos dos sistemas LiDAR destinados ao uso automotivo que apresentam desafios especiais para designers e fabricantes de filtros e revestimentos ópticos. O primeiro deles é o ambiente operacional; esses filtros podem apresentar uma ampla faixa de temperatura (- 40 ° C a + 80 ° C) e, particularmente no caso de janelas, podem ser expostos a chuva, gelo, sal de estrada e todos os outros elementos encontrados quando um carro passa pela estrada. Veja a curva de desempenho espectral do filtro passa-banda de 905nm.
Esse ambiente não controlado impulsiona a necessidade de filtros termicamente estáveis, bem como filtros compostos por revestimentos muito robustos e confiáveis. Além disso, esses filtros precisam poder operar sob essas condições sem manutenção ou calibração durante a vida útil do veículo.
As câmeras ópticas podem fornecer imagens precisas de uma cena, mas têm alcance limitado, não fornecem informações de distância e velocidade relativa e limitam-se a funcionar em condições bem iluminadas e com boa visibilidade. A visão fornecida pelas câmeras reproduz mais de perto a dos motoristas humanos, mas queremos e precisamos de soluções autônomas para ser melhor do que estamos vendo o ambiente de direção.
A tecnologia LIDAR é aplicada em arqueologia, geografia, oceanografia e é capaz de identificar estruturas mesmo sob o manto de uma floresta densa. De uso aeroespacial, agora equipa veículos rodoviários como carros e caminhões, contribuído para o veículo autônomo enxergar o que tem nas rodovias.
A evolução de sistemas de detecção e imagem cada vez mais acessíveis e capazes, combinada com o desejo de criar sistemas de transporte mais seguros e eficientes, está impulsionando o desenvolvimento de veículos autônomos.
Em termos de software, o maior desafio foi garantir que o caminhão conceito seja suficientemente seguro para ser conduzido sem um volante. Em essência, o volante tem sido a precaução pela qual um motorista pode intervir se algo der errado. Quando não temos isso, o sistema deve simplesmente funcionar perfeitamente.
“O que é um 'volante'?” No momento, essa seria uma pergunta muito estranha de ser ouvida por qualquer pessoa que dirigiu, andou de carro ou até mesmo viu um carro, mas em algumas décadas isso pode não parecer tão incomum.
Um dos membros da equipe de desenvolvimento lembrou que, durante os testes, o Scania AXL foi içado e colocado em suportes de eixo para impedir que o caminhão se movesse descontrolado e agora, vendo caminhão rodando sozinho e seguro, é um sonho tecnológico realizado.