A presente matéria tem por objetivo apresentar o conceito de “ciclo de trabalho” aplicado aos sinais de acionamento de atuadores assim como a troca de informações entre dispositivos. Primeiramente, serão apresentados os conceitos básicos de sinais elétricos, necessários ao pleno entendimento do assunto. Para aqueles conhecedores do tema, o único objetivo é o de consolidar e uniformizar conceitos.
O conceito de “ciclo de trabalho” é relevante no entendimento do funcionamento de um número considerável de sistemas de eletrônica embarcada e, conseqüentemente, no diagnóstico dos mesmos.
1. Sinais Elétricos
As unidades de controle dos sistemas de eletrônica embarcada funcionam utilizando sinais elétricos. Ou seja, sinais variáveis de tensão ou de corrente.
Os sensores medem os valores das diversas variáveis de funcionamento (temperatura, pressão, rotação, etc) e os convertem em sinais elétricos; na maioria dos casos em sinais de tensão elétrica. No entanto há no mercado, sensores que fornecem sinais de corrente variável.
Por sua vez, os atuadores convertem os comandos recebidos na forma de sinais elétricos, nas ações desejadas. Tais sinais elétricos podem ser de dois tipos: sinais contínuos ou analógicos e sinais digitais
SINAIS ANALÓGICOS
A característica fundamental destes sinais é que variam de forma contínua entre dois valores limites de tensão ou corrente.
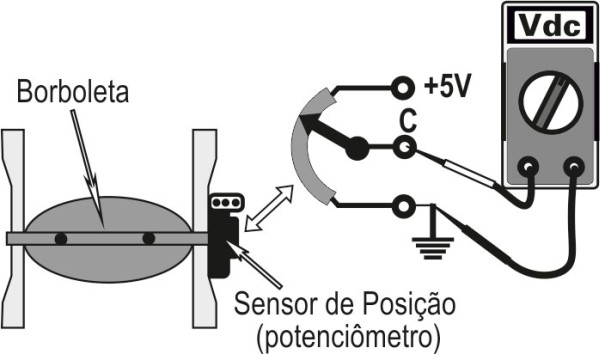
Um exemplo de sinal analógico é aquele enviado pelo sensor TPS (posição da borboleta) potenciométrico, no qual o sinal varia sem descontinuidades entre 0 e 5V. (fig.1)
SINAL ANALÓGICO ALTERNADO
Um tipo particular de sinal analógico é aquele enviado, por exemplo, por um sensor de rotação de relutância magnética variável. É um sinal analógico alternado. Ainda que se apresente com variações abruptas, o sinal é continuamente variável; não apresenta saltos de descontinuidade. Ou seja, o sinal varre todos os valores de tensão entre o pico positivo (Vmax) e o negativo (Vmin), como mostra a figura 2.
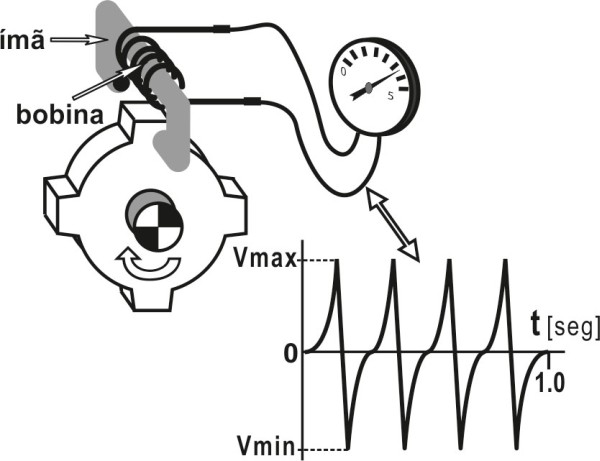
Uma característica destes sinais analógicos alternados é a sua “freqüência”, definida como a quantidade de impulsos presentes na unidade de tempo; geralmente, 1 segundo ou 1 minuto.
Quando a unidade utilizada é o segundo, o valor da freqüência mede-se em “ciclos por segundo” ou Hertz (abreviado Hz). Quando a unidade utilizada é o minuto a freqüência se mede em “rpm”. Assim, no exemplo da figura 2, a frequência do sinal é de 4 Hz.
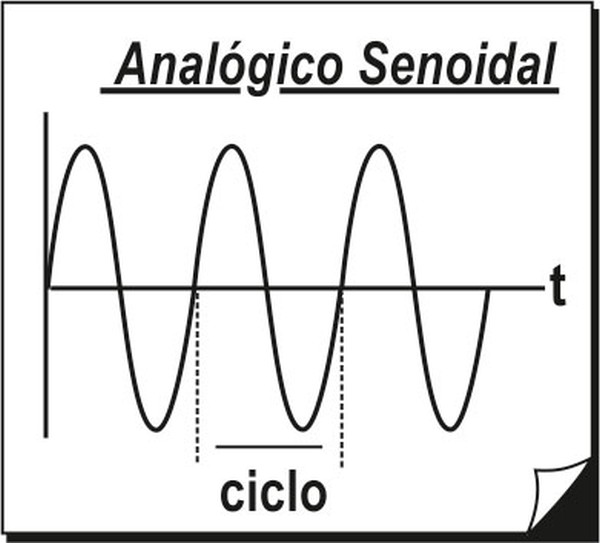
ONDA SENOIDAL
É um caso particular de sinal alternado e deve seu nome à fórmula matemática que o descreve Este é o tipo de onda de tensão gerado pelo alternador automotivo e pelo sistema público de distribuição de energia elétrica. (fig.3)
SINAIS DIGITAIS
Sinais digitais são aqueles que apresentam descontinuidades no seu valor, quando a quantidade medida varia. Ou seja, o sinal elétrico que o sensor envia não varia de forma contínua quando se modifica o valor medido.
Temos, na figura 4, um interruptor térmico em contato com o líquido arrefecedor do motor.
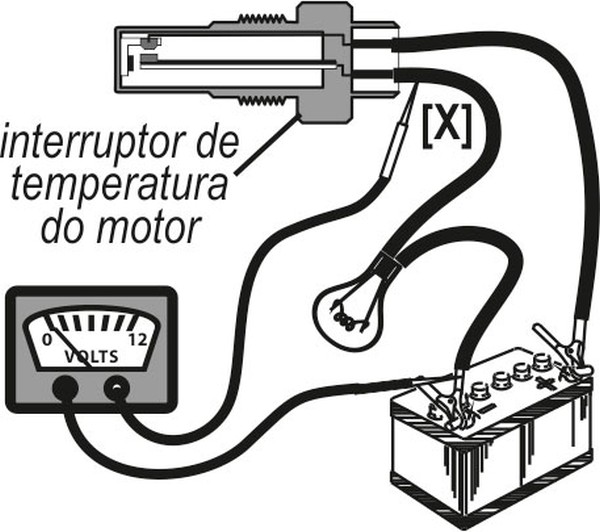
- Quando a temperatura é menor que 100 graus o interruptor permanece aberto, como é o caso da figura 4.
- Quando a temperatura é maior que 100 graus o interruptor fecha e a lâmpada acende.
Por tanto, no terminal [x] podemos medir os seguintes valores de tensão com relação à massa:
- 12 volts: se a temperatura for maior que 100 graus; interruptor fechado, lâmpada acesa.
- 0 volts: se a temperatura for menor que 100 graus; interruptor aberto, lâmpada apagada.
Como vemos, o sensor não tem condição de sinalizar outro tipo de informação senão 0 volts ou 12 volts (ligado ou desligado).
Um sinal elétrico que apresente tal característica é denominado sinal digital. É, também, conhecido como sinal “on-off” (do inglês: “on-off” = ligado-desligado).
SINAL PULSADO
Dentro dos sinais digitais, um tipo particular e muito utilizado nos sistemas de eletrônica embarcada, é o sinal pulsado ou trem de pulsos. (fig.5)
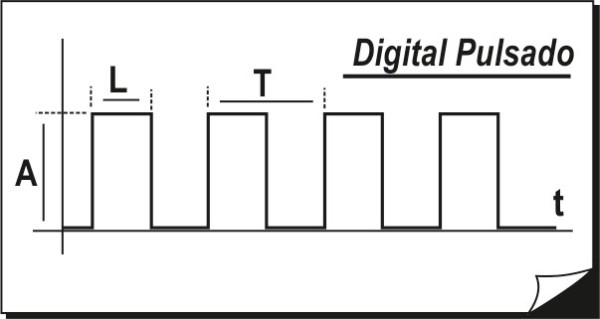
Os parâmetros que caracterizam um sinal pulsado ou trem de pulsos são:
Amplitude do sinal: é a diferença de tensão que há entre o nível alto do sinal (denominado nível 1) e o nível baixo (denominado nível 0), este último, geralmente, 0 volt. Nos sistemas de eletrônica embarcada o nível 1 é, geralmente, 5 volts ou 12 volts.
Freqüência [f]: é a quantidade de pulsos que se sucedem na unidade de tempo. Quando a unidade de tempo considerada é o segundo, a freqüência de um sinal pulsado se expressa em Hertz [Hz].
Período [T]: é o tempo em segundos (abreviado “seg”) entre o começo de dois pulsos sucessivos. O período de um sinal pulsado se expressa também em milissegundos (abreviado “mseg”) ou em microssegundos (abreviado “useg”).
Largura [L]: é o tempo em que, durante o período, o sinal permanece no nível alto.
No exemplo da figura 6 está representado o sinal emitido por um sensor de rotação; nela vemos que:
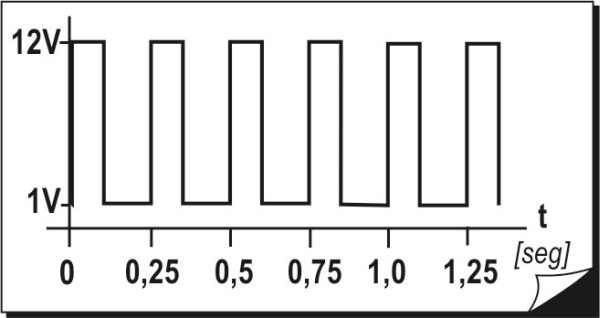
 - A diferença de tensão entre o nível 1 (Vmáx) e nível 0 (Vmín) é: 12V-1V = 11V que é portanto, a amplitude do sinal.
- A diferença de tensão entre o nível 1 (Vmáx) e nível 0 (Vmín) é: 12V-1V = 11V que é portanto, a amplitude do sinal.
- Também, podemos deduzir que, na unidade de tempo (1 seg), o sinal apresenta 4 pulsos. Portanto, a freqüência do sinal é 4 Hz (hertz).
- Com relação ao período podemos dizer que é 250 mseg ou 0,25 seg.
- E a largura de pulso é, aproximadamente, 100 mseg.
Tanto sinais pulsados como sinais analógicos alternados são muito utilizados nos sistemas de eletrônica embarcada para medir, por exemplo, a velocidade de rotação do motor ou da roda. Para isso a unidade de comando “conta” o número de pulsos recebidos na unidade de tempo (1 segundo, por exemplo), e conhecendo o número de impulsos emitidos pelo sensor a cada giro do eixo, consegue determinar a velocidade de rotação em rpm.
Exemplo: Suponhamos uma roda dentada de 62 dentes solidária ao virabrequim de um motor. Num determinado momento a unidade de comando conta 3100 pulsos (enviados pelo sensor) durante 1 segundo.
A partir deste dado, e sabendo que a roda possui 62 dentes, a unidade de comando calcula a velocidade de rotação como segue:
3100 pulsos/62 pulsos por volta = 50 rotações por segundo
Portanto, em 1 minuto (60 segundos) a roda gira:50 x 60= 3000 rpm (rotações por minuto)
MEDIÇÃO DE FREQUÊNCIA
O instrumento utilizado é o frequencímetro. Geralmente, os multímetros automotivos possuem esta função na forma de medidor de RPM. Os mais modernos incluem ainda escalas de medição de freqüência em Hz. Estas são utilizadas para verificar o sinal de saída de sensores digitais como MAP, MAF e outros.
2. Ciclo de Trabalho em Sinais Elétricos
O conceito de ciclo de trabalho é aplicado, geralmente, aos sinais pulsados retangulares ou trem de pulsos repetitivos, de freqüência fixa.
O conceito pode ser aplicado a sinais elétricos (objeto desta matéria), sinais sonoros e a movimento mecânico.
Para a análise será utilizada a configuração apresentada na figura 7. Nela, a unidade de comando controla a lâmpada incandescente com um sinal pulsado de período T = 2seg. O período T é o tempo entre as bordas de começo de dois pulsos sucessivos.
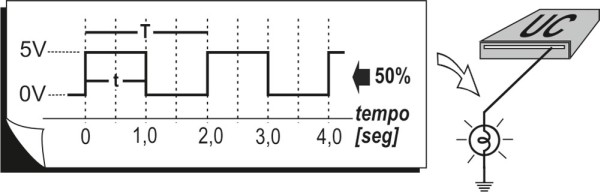
Por sua vez, lembrar que a freqüência F do sinal é a quantidade de pulsos que se sucedem na unidade de tempo. Ou seja, é o inverso do período T, ou seja, 1/T. Quando a unidade de tempo considerada é o segundo, a frequência de um sinal pulsado se expressa em Hertz [Hz]. No caso do exemplo, a frequência resulta igual a 0,5 Hz (um pulso a cada 2 segundos).
No exemplo, os pulsos têm uma largura ou duração de t segundos. Durante esse tempo, a lâmpada permanece energizada. A cada ciclo de T segundos, portanto, a lâmpada iluminará durante t segundos e permanecerá apagada durante [T-t] segundos. A partir desses valores é definido o ciclo de trabalho (ou ciclo de acionamento) como:

Geralmente, o ciclo de trabalho é apresentado em porcentagem. Uma consideração muito importante é que t é o tempo durante o qual a carga (lâmpada, motor, etc.) permanece ativada. Reparar que a carga pode ser ativada por positivo (caso do exemplo), fornecendo alimentação, ou por negativo, fornecendo massa.
Na figura 7, portanto, o ciclo de trabalho é 50%. Notar que dependendo do período T, o resultado que se observa varia bastante.
Assim, se aplicamos uma onda de tensão conforme a figura 7 (T=2seg) a lâmpada ilumina durante 1seg, e permanece apagada durante 1seg, tempos estes, suficientes para que o filamento consiga acender totalmente e apagar-se totalmente.
O olho humano consegue perceber os instantes durante os quais a lâmpada está acesa e aqueles em que está apagada.
Se, numa outra experiência, aplicarmos um sinal como o da figura 8, com freqüência F=5Hz (período T=200mseg) a lâmpada permanece acessa por 100mseg, e apagada, também, durante 100mseg.
Neste caso, e devido à inércia térmica, o filamento não consegue aquecer-se totalmente, nem esfriar completamente. A lâmpada fica, portanto, com temperatura (e luminosidade) de 50% com relação àquela que teria se submetida à tensão plena constante.
Portanto, quando o período é suficientemente longo, os nossos olhos conseguem perceber as oscilações de luminosidade da lâmpada. Na medida em que o período T da onda diminui e a sua freqüência F aumenta, as oscilações tornam-se cada vez menos perceptíveis; seja pela inércia própria do dispositivo (lâmpada), seja pela incapacidade dos nossos sentidos de perceber tais oscilações. Notar que em ambos os casos (figura 7 e figura 8) o ciclo de trabalho é 50%.
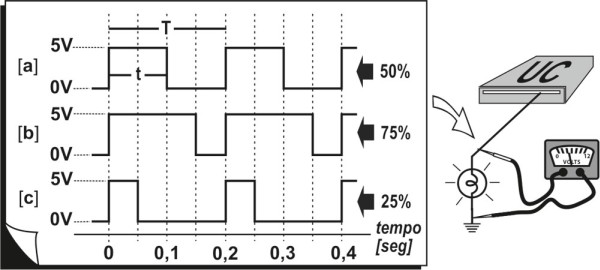
Por sua vez, se a largura de pulso for aumentada para 150 mseg (0,15seg) mantendo o mesmo período de 200mseg (figura 8b), veremos que a lâmpada aumentará sua luminosidade para 75% daquela obtida quando alimentada constantemente. Na figura 8c o ciclo de trabalho e a luminosidade diminuem para 25%.
Desta forma, a luminosidade pode ser controlada entre 0% e 100%, variando a largura do pulso e mantendo o período e a freqüência constantes.
Se agora medimos, com um multímetro analógico, a tensão gerada pela fonte do sinal pulsado, poderemos observar que, no caso da figura 7, o ponteiro oscilará entre 0 e 5 volts.
Já no caso da figura 8a, o ponteiro não conseguirá acompanhar as oscilações do sinal e indicará a tensão média, que é 2,5V. No caso da figura 8c, a tensão indicada será 1,25V e no caso da figura 8b, 3,75V.
VALOR MÉDIO
O valor médio de um sinal pulsado retangular é, por definição, igual ao ciclo de trabalho vezes a tensão do sinal. Esta definição é válida para o caso em que o sinal oscila entre 0V e a tensão máxima, como mostra a figura 9.
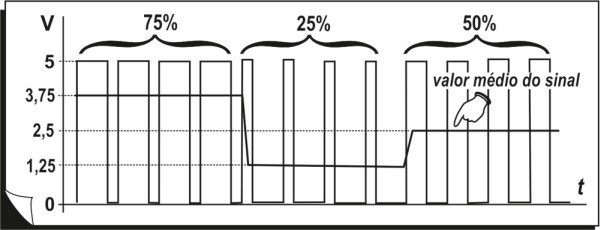

Aplicando a fórmula ao exemplo da figura 9 e para ciclo de trabalho = 75%: Valor médio = 75% / 100 x 5V = 3,75V
Os outros valores médios da figura 9 podem ser obtidos de forma similar, aplicando a fórmula acima.
Portanto, do conceito de valor médio e dos cálculos acima, resultam as seguintes conclusões:
- Quando a freqüência do sinal pulsado é suficientemente elevada, com relação à máxima freqüência de oscilações que o instrumento consegue detectar (acompanhar), este se comporta como se medisse o valor médio do sinal.
- Quando a freqüência do sinal pulsado é suficientemente elevada, com relação à máxima freqüência de oscilações que o atuador consegue acompanhar, este se comporta como se fosse alimentado com uma tensão igual ao valor médio do sinal de comando.
Na próxima edição, serão apresentadas algumas aplicações características, presentes nos sistemas de eletrônica embarcada.