O sistema de injeção eletrônica surgiu para trazer melhorias no aproveitamento do combustível e consequentemente diminuição na emissão de poluentes. A chave para que isso seja possível é a chamada Estequiometria. A Estequiometria é um estudo que estabeleceu as razões ideais da mistura ar/combustível usada na combustão. Portanto, podemos dizer que uma mistura estequiométrica é uma mistura ideal.
Sensores automotivos
Pode-se definir sensores como elementos que transformam variações de grandezas físicas em variações de grandezas elétricas. Por exemplo, um sensor de temperatura consegue representar uma variação de grandeza física (°C) em grandeza elétrica (V). A ECU, que processará esse sinal para comandar corretamente os atuadores, entende apenas grandezas elétricas.
Porém a maneira como essas grandezas são convertidas varia de sensor para sensor. No veículo existem diferentes classes de sensores. Porém, ao analisar a forma como o módulo do motor processa os sinais dos sensores, podemos separá-los em duas classes básicas: sensores alimentados e sensores que não necessitam de alimentação. Vejamos alguns exemplos.
Processamento de sinais de sensores alimentados pelo Módulo
Tomemos como exemplo nesse caso um sensor de temperatura do líquido de arrefecimento. Os sensores de temperatura necessitam de alimentação para funcionar, pois são da classe termo resistiva. Possuem em sua construção um componente chamado termistor. O termistor tem a propriedade de oferecer uma resistência variável de acordo com a temperatura externa a qual ele é submetido. A forma como essa resistência irá variar depende do coeficiente de temperatura do termistor. Os sensores da classe NTC são os mais comuns, e devido ao seu coeficiente de temperatura negativo, seu valor de resistência diminui conforme o aumento de temperatura, consequentemente os valores de tensão do sinal irão diminuir (pois conseguimos verificar apenas a tensão “excedente” ao consumo. Os sensores PTC funcionam da maneira oposta.)
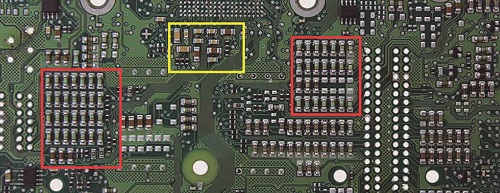
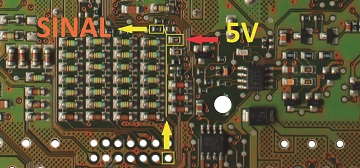
Os circuitos dos sensores passivos dentro do módulo do motor são constituídos basicamente por capacitores de cerâmica e resistores. Tais componentes ligados em um mesmo circuito e em configurações em série e paralelo formam um circuito filtro de ruídos chamado “low pass”. As interferências ou ruídos elétricos são muito comuns devido ao ambiente de trabalho dos sensores – um motor em funcionamento.
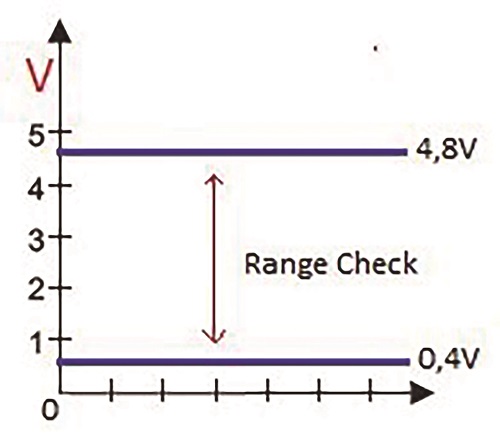
Além disso, parte do circuito filtro de ruídos e interferências são os resistores ligados a uma alimentação positiva do mesmo valor da tensão de alimentação primária do sensor (geralmente 5 V). Isso possibilita a formação de um circuito divisor de tensão para estabilização da linha e ainda possibilita a identificação de falhas pelo processador do módulo, pois, caso haja a falta total de sinal do sensor, como por exemplo, o rompimento de um fio do sinal, a tensão de 5V do resistor alimentado chega à linha de tensão pode ser medida pelo processador. Esse valor de tensão extremo está fora da faixa normal de trabalho do sensor pré-estabelecida no software, que chamamos de “Range Check”.
Processamento de sinais de sensores não alimentados pelo módulo
 Os principais sensores não alimentados pelo módulo são os sensores indutivos por outro lado, não necessitam de alimentação para funcionar, pois sua construção física permite que esse sensor gere sua própria tensão elétrica de sinal. Sensores indutivos são amplamente utilizados para medições de rotação e fase. O princípio de indução é a geração de tensão a partir de distorção de campo magnético. Esse campo magnético é gerado pelo próprio sensor e a distorção dele é feita pela roda fônica, comando de válvulas etc.
Os principais sensores não alimentados pelo módulo são os sensores indutivos por outro lado, não necessitam de alimentação para funcionar, pois sua construção física permite que esse sensor gere sua própria tensão elétrica de sinal. Sensores indutivos são amplamente utilizados para medições de rotação e fase. O princípio de indução é a geração de tensão a partir de distorção de campo magnético. Esse campo magnético é gerado pelo próprio sensor e a distorção dele é feita pela roda fônica, comando de válvulas etc.
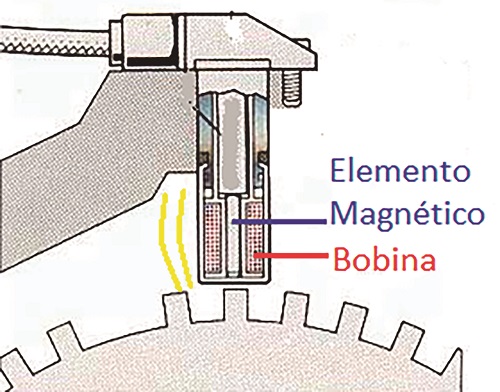
A geração do campo magnético estático é feita devido à construção do sensor, que é composto basicamente por um ímã permanente que tem ao seu redor um enrolamento, formando uma bobina. Ao conectarmos uma das extremidades dessa bobina enrolada ao ímã em um aterramento – que podemos chamar de fonte de elétrons – um campo magnético é formado. As distorções desse campo magnético estático causadas pelo movimento da roda fônica, por exemplo, produzirão picos de tensão. A frequência desses picos indica para a ECU qual a rotação do veículo.
Processamento dos sinais pelo módulo eletrônico
Os sensores alimentados pelo módulo chegam ao circuito como medidas de tensão contínua variáveis. Sendo assim, após o circuito filtro “low pass” o sinal segue direto para o processador, onde é internamente convertido para um sinal digital e armazenado para processamento.
Os sensores não alimentados pelo módulo necessitam de mais etapas de processamento. Devido à construção que esses sensores possuem o sinal gerado é analógico fônico, com picos de tensão bem maiores do que as alimentações internas do processador, que é em maioria de 5V. Os sinais desses sensores podem ter amplitudes iguais às de bateria. Portanto, é necessário reduzir a amplitude dos sinais.
Por ser um sensor que gera sinais baseados em distorções de um campo magnético, um circuito “low pass” maior e elaborado é necessário. Além de apenas componentes para filtro de interferências o circuito conta com um diodo retificador chamado de “meia-onda”, que como o nome sugere, tem a função de eliminar a parte negativa do sinal que é inevitavelmente gerado, mas que não é útil para o processador.
Finalmente, o sinal com tensões próximas de 5V e apenas com a parte positiva da onda entra em um C.I. (Circuito Integrado) chamado “conversor A/D”, que tem a importante função de converter o sinal fônico analógico para um sinal digital de 5V. Somente assim o processador consegue processar a informação de rotação. Vale ressaltar que o diodo meia-onda também é encontrado em alguns casos dentro C.I. A/D.
Falhas possíveis nos circuitos dos Sensores
Uma falha comum nos circuitos internos ao módulo do motor relacionados aos sensores é o curto-circuito nos componentes filtro dos sinais – “low pass”. Os capacitores de cerâmica e os resistores desse circuito podem ser os responsáveis por falhas que comumente vemos no scanner como: curtos à massa e curtos ao positivo. Isso ocorre quando um dos capacitores de cerâmica da linha entra em curto com o aterramento de filtro ou um dos resistores de alimentação ou identificação de falhas que consideramos entra em curto com a alimentação constante de 5V.
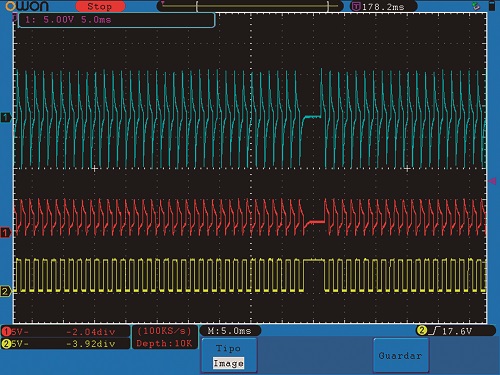
Uma outra falha mais rara relacionada aos sensores que não são alimentados pelo módulo são as falhas de conversão do C.I. A/D ou falhas de período e frequência nos sinais causadas pelo circuito filtro. Por exemplo, pode ocorrer uma situação de oscilação na marcha lenta do veículo ou demora na resposta de aceleração ocasionada por uma falha no módulo e que não gera código de falhas no scanner. Isso ocorre pois o processador recebe um sinal digital de rotação, porém errado, com um espaçamento de períodos incorreto, que indica ao processador que o motor está em marcha mais lenta do que realmente está. A verificação dessa falha deve ser feita com um osciloscópio e usando a comparação dos sinais nas etapas consideradas do circuito. Verifique a conformidade dos períodos, como exemplificado na imagem acima.