Nesta matéria vamos dar continuidade ao tema redes de comunicação, agora dando ênfase ao diagnóstico de falhas utilizando o osciloscópio. Apresentaremos um caso de estudo em que o reparador, além de interpretar o sinal da rede, utilizou técnicas de diagnóstico para conseguir identificar o ponto específico que ocasionava a falha.
1. Introdução - A comunicação entre os módulos é realizada por um grupo de informações (protocolo CAN), formando uma trama. Os módulos se comunicam por um barramento enviando informações (status dos sensores, atuadores) e solicitação (requerimento para atuação para outro módulo de controle). A figura 1 apresenta, esquematicamente, a estrutura dessa comunicação.

Figura 1
Na maioria dos veículos atuais são aplicados diferentes sistemas de comunicação, no que diz respeito a características construtivas e velocidade da transmissão de dados, para atender à evolução dos automóveis, preservando a qualidade, bom funcionamento e praticidade na reparação.
2. Conceitos - Em nosso estudo vamos nos aprofundar na Rede CAN de alta velocidade, na qual as informações transitam em um par de fios entrelaçados (CAN+ e CAN-), interligando os módulos (2 ou mais) conforme sua arquitetura. Em geral neste tipo de rede são utilizadas resistências de terminação estrategicamente posicionadas para impedir o retorno dos dados no barramento CAN. O retorno é uma forma de interferência que pode causar um “pico” de tensão, dessa forma corrompendo a mensagem.
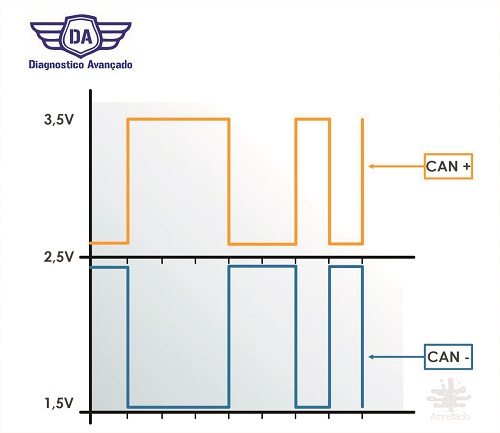
Figura 2
A resistência é cuidadosamente correspondida às características da rede para fornecer um caminho às mensagens no final de sua transmissão.
3. Entendendo o sinal da rede
Ao analisar os sinais CAN (+) e CAN (-) via osciloscópio, é possível visualizar uma onda quadrada com diferentes níveis de tensão, classificada como:
CAN (+):
2,5 V – Tensão recessiva
3,5 V – Tensão Dominante
CAN (-):
2,5 V – Tensão recessiva
1,5 V – Tensão Dominante
Conforme mostra a figura 2, a onda quadrada CAN (+) é um espelho da CAN (-), com níveis de tensões diferentes entre eles.
A composição dos sinais gera um nivel lógico 0 e 1, da seguinte forma como exibe as figuras 3 e 4:
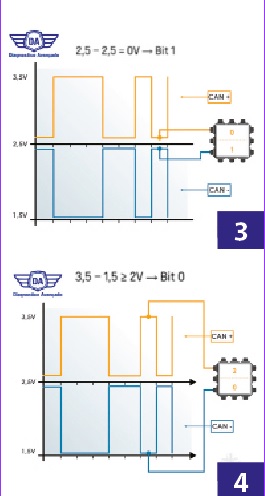
Figura 3 - 4
Tensão CAN (+) – Tensão CAN (-).
Feito os devidos esclarecimentos, vamos agora mostrar onde se realiza a captura desse sinal e como ele fica na tela do osciloscópio.
Para tanto, devemos dispor de um diagrama elétrico que mostre os possiveis pontos de medição.
A figura 5 exibe um diagrama elétrico mostrando os pontos de captura do sinal da rede no módulo de controle do motor.
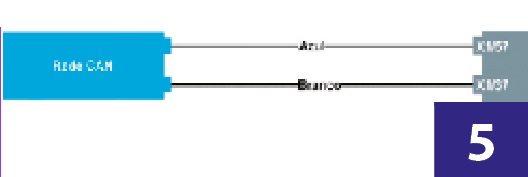
Figura 5
Neste exemplo, para se visualizar o sinal da rede no osciloscópio o reparador teria que colocar as pontas de provas nos pinos 57 e 37 do conector X1 do módulo de controle.
Lembrando que outro ponto de acesso seria no conector DLC ou conector de diagnóstico através dos pinos 6 e 14, tomando o cuidado de verificar se na rede em que se está trabalhando precisa da colocação do scanner para ser ativada e só a partir daí apresentar o sinal conforme demonstra a figura 6.
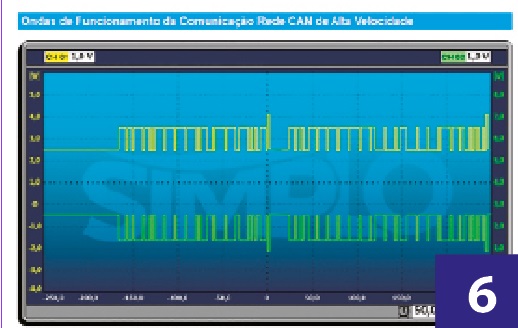
Figura 6
Uma caracteristica peculiar deste tipo de sinal é o espelhamento; como foi dito anteriormente, observando a figura 6 vemos que este requisito é respeitado durante todo o periodo da trama, o que significa que a comunicação está acontecendo de forma normal.
4. Possíveis anomalias na rede
a) CAN (+) em curto com a massa.
b) CAN (-) em curto com a massa.
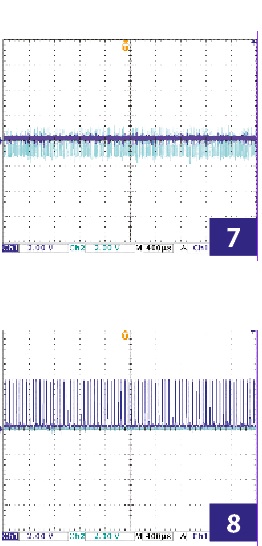
Figura 7 - 8
O nível de referência tanto da CAN (+) quanto da CAN (-) é o nível do aterramento (0V).
A forma de onda do sinal CAN (+) oscila irregularmente entre 0V e 3V, e a CAN (-) permanece em 0V.
c) Linha aberta CAN (+).
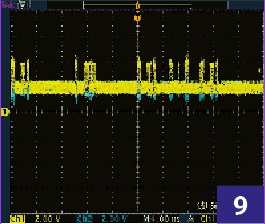
Figura 9
O nível de referência de tensão dos sinais CAN (+) e do CAN (-) é instável e tende a indicar um valor inferior ao produzido pelo estado normal (2,5V). Além disso, a forma de onda do sinal CAN (+) oscila irregularmente, mas a do sinal CAN (-) é praticamente constante.
d) Linha aberta CAN (-).
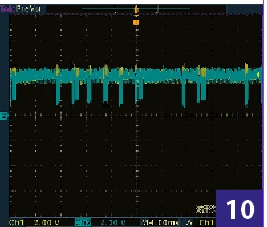
Figura 10
O nível de referência de tensão dos sinais CAN (+) e CAN (-) é instável e tende a indicar um valor inferior que o produzido pelo estado normal (2,5V). Além disso, a forma de onda do sinal CAN (-) oscila irregularmente, mas a do sinal CAN (+) é praticamente constante.
e) CAN (+) em curto com o positivo 12V.
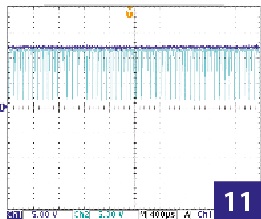
Figura 11
O sinal CAN-Hi (alto) permanece com 12 volts.
O sinal CAN-Lo (baixo) oscila entre 1,5 e 12 volts.
f) Curto-circuito entre as linhas CAN.
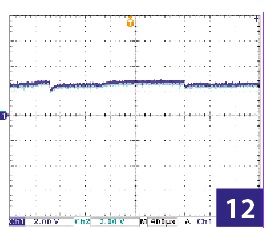
Figura 12
Quando a linha dos CAN High (alto) e CAN low (baixo) estiverem em curto entre si, ambos os sinais se apresentarão fixos em aproximadamente 2,5 V.
5. Caso de estudo - Este caso foi cedido, gentilmente, pelo técnico automotivo Daniel Flores, funcionário da Baratão Auto Peças localizada em Fortaleza-Ceará.
O proprietário de uma S-10 motor 2.8 Diesel relata que estava dirigindo seu veículo quando de repente todas as luzes do painel acenderam e o veículo entrou em estratégia de emergência. Chamou o reboque para não ter danos maiores.
O primeiro passo realizado pelo reparador foi conferir quais as luzes que estavam acesas no painel para confirmar a reclamação do cliente.
A figura 13 apresenta o painel com as luzes acesas e algumas informações no display de informações ao cliente (DIC).

Figura 13
Ao constatar as informações no painel o técnico confirmou que o sistema entrou em estratégia de emergência.
O próximo passo foi a instalação do scanner para ver possiveis códigos de falhas que poderiam ajudá-lo na identificação da causa da anomalia.
A figura 14 mostra o resultado da verificação.
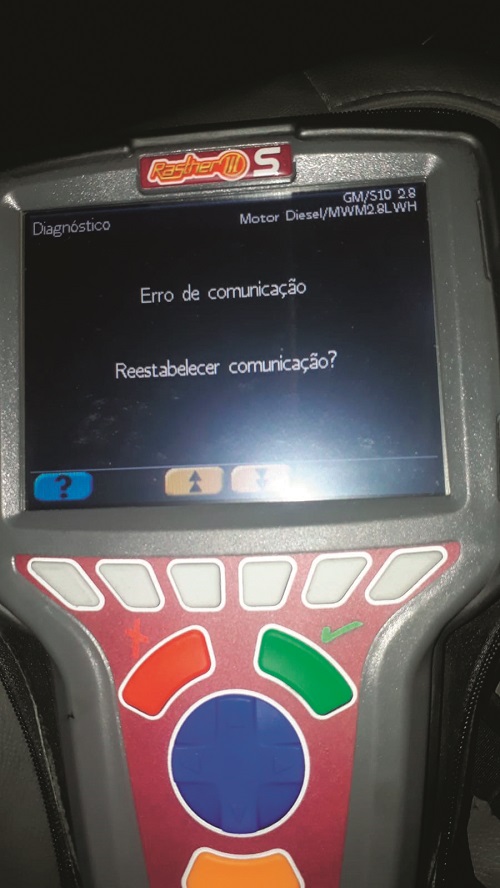
Figura 14
Para sua surpresa a ferramenta de diagnóstico não conseguiu se comunicar com os módulos, o que indicava possíveis problemas na rede de comunicação ou no próprio scanner. Entretanto, Daniel sabia que não era o scanner, pois o mesmo tinha sido utilizado há pouco tempo em outro veículo.
Desta forma, realizou sem perda de tempo a análise da rede de comunicação com osciloscópio. O resultado da captura é exibido pela figura 15.
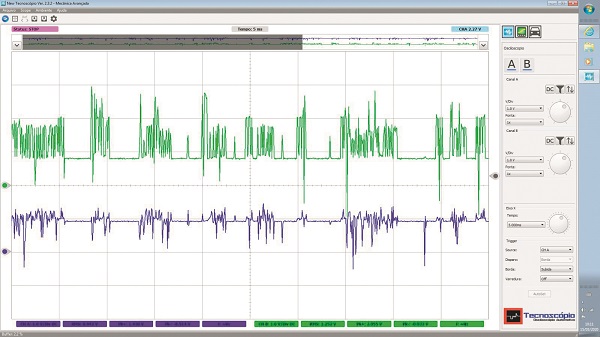
Figura 15
De posse da imagem constatou que havia alguma falha na rede, poderia ser devido a problemas fisicos nesta rede, ou seja, nos pares de fios entrelaçados, ou em algum módulo de controle.
Decidiu iniciar verificando o diagrama elétrico da rede de comunicação do veículo em questão para saber quais os módulos se comunicam naquela rede. Após essa identificação, observou quais módulos poderiam estar causando a falha.
Começou a desligar os módulos que não tinham resistência de terminação, dos módulos de melhor acesso aos de pior acesso, para ver se o sinal tinha alguma mudança significativa.
Para sua surpresa o módulo do ABS, ao ser desligado, fazia com que o sinal voltasse para o seu formato normal, ou seja, de espelhamento.
A figura 16 mostra o sinal capturado.
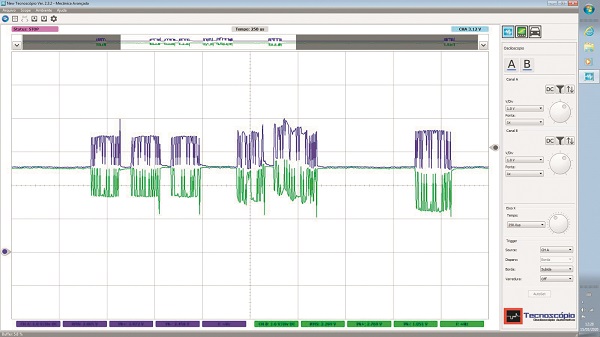
Figura 16
Ao observar isso, o técnico, de posse do diagrama elétrico, realizou a ligação direta entre os barramentos sem passar por dentro do módulo para confirmar que realmente o problema era dentro do módulo.
A figura 17 exibe a ligação realizada.

Figura 17
Feita a ligação fez uma nova captura com osciloscópio e obteve a imagem conforme mostra a figura 18.
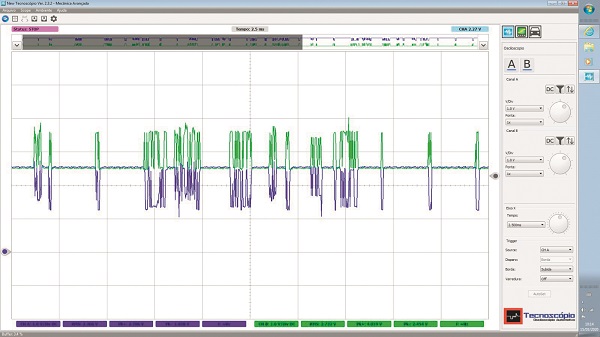
Figura 18
Após a confirmação, Daniel solicitou um novo módulo de controle do freio ABS, instalou e fez novamente mais uma captura para confirmar de uma vez por todas a assertividade do diagnóstico. A figura 19 exibe o sinal da rede após a substituição do módulo.
Figura 19
Ao confirmar que o sinal estava dentro do esperado, sem perdas de tempo, instalou o scanner e apagou os códigos de falhas.
Funcionou o veículo e confirmou que todos os paramêtros estavam dentro do recomendado, deu uma volta com o veículo junto com o cliente, confirmando seu perfeito funcionamento e fechando mais um diagnóstico com chave de ouro.